

Contact scientifique
Gaëtan Bellot
Chercheur Inserm
Centre de biologie structurale (Inserm/CNRS/Université de Montpellier)
E-mail : rf.mresni@tolleb.nateag
Téléphone sur demande
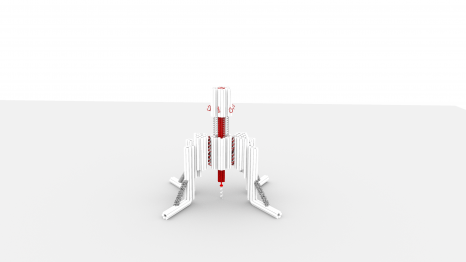
Les scientifiques sont parvenus à concevoir un « nano-robot » composé de trois origamis d’ADN. Crédits : Gaëtan Bellot/Inserm
Mieux comprendre divers processus invisibles à l’œil nu, qui ont lieu à l’échelle de nos cellules, grâce à un minuscule robot construit à base d’ADN… Si cela s’apparenterait presque à un projet de science-fiction, il s’agit en fait de travaux très sérieux menés par des chercheurs et chercheuses de l’Inserm, du CNRS et de l’Université de Montpellier au Centre de biologie structurale de Montpellier[1]. Ce « nano-robot », très innovant, devrait permettre d’étudier de plus près des forces mécaniques qui s’appliquent à des niveaux microscopiques et qui sont cruciales pour de nombreux processus biologiques et pathologiques. Le dispositif est décrit dans une nouvelle étude, publiée dans la revue Nature Communications.
Des forces mécaniques s’exercent à l’échelle microscopique sur nos cellules, déclenchant des signaux biologiques qui sont essentiels à de nombreux processus cellulaires impliqués dans le fonctionnement normal de notre organisme ou dans le développement de pathologies.
Par exemple, la sensation de toucher est en partie conditionnée à l’application de forces mécaniques sur des récepteurs cellulaires spécifiques (dont la découverte a été récompensée cette année par le prix Nobel de médecine).
Un dysfonctionnement de cette mécano-sensibilité cellulaire est notamment impliqué dans de nombreuses pathologies comme le cancer : les cellules cancéreuses migrent dans le corps en sondant et en s’adaptant constamment aux propriétés mécaniques de leur microenvironnement. Cette adaptation peut se faire seulement parce que des forces spécifiques sont détectées par des mécano-récepteurs qui transmettent l’information vers le cytosquelette des cellules.
A l’heure actuelle, nos connaissances sur ces mécanismes moléculaires impliqués dans la mécano-sensibilité cellulaire sont encore très limitées. Plusieurs technologies sont déjà disponibles pour appliquer des forces contrôlées et étudier ces mécanismes, mais elles comportent un certain nombre de limites. Elles sont notamment très coûteuses et ne permettent pas d’étudier plusieurs récepteurs cellulaires à la fois, ce qui signifie qu’elles sont très chronophages à utiliser si l’on souhaite collecter de nombreuses données.
Pour proposer une alternative, l’équipe de recherche menée par le chercheur Inserm Gaëtan Bellot au Centre de biologie structurale (Inserm/CNRS/Université de Montpellier) a décidé de s’appuyer sur la méthode des origamis d’ADN. Celle-ci permet l’auto-assemblage de nanostructures 3D dans une forme prédéfinie en utilisant la molécule d’ADN comme matériel de construction. Au cours des dix dernières années, la technique a permis des avancées majeures dans le domaine des nanotechnologies.
Les chercheurs et chercheuses sont ainsi parvenus à concevoir un « nano-robot » composé de trois origamis d’ADN. De taille nanométrique, il est donc compatible avec la taille d’une cellule humaine. Il permet pour la première fois d’appliquer et de contrôler une force avec une résolution de 1 piconewton, soit un mille-milliardième de Newton, un Newton correspondant à la force d’un doigt sur le poussoir du stylo. C’est la première fois qu’un objet auto-assemblé à base d’ADN créé par l’humain peut appliquer une force avec cette précision.
Un tel outil est très précieux pour la recherche fondamentale, car il pourrait être utilisé pour mieux comprendre les mécanismes moléculaires impliqués dans la mécano-sensibilité cellulaire et découvrir de nouveaux récepteurs cellulaires sensibles aux forces mécaniques. Grâce au robot, les scientifiques pourront également étudier plus précisément à quel moment, lors de l’application d’une force, des voies de signalisation clés pour de nombreux processus biologiques et pathologiques s’activent au niveau des cellules.
« La conception d’un robot qui permet d’appliquer des forces de l’ordre du piconewton in vitro et in vivo répond à une demande croissante dans la communauté scientifique et représente une avancée technologique importante. En revanche, la biocompatibilité du robot peut être à la fois considérée comme un avantage pour des applications in vivo mais également représenter une faiblesse avec une sensibilité aux enzymes qui peuvent dégrader l’ADN. Donc la prochaine étape de notre travail sera d’étudier comment on peut modifier la surface du robot pour qu’il soit moins sensible à l’action des enzymes. Nous allons également tenter de trouver d’autres modes d’activation de notre robot en utilisant par exemple un champ magnétique », souligne Gaëtan Bellot.
[1] Ont également contribué à ces travaux l’Institut de génomique fonctionnelle (CNRS/Inserm/Université de Montpellier), l’Institut des biomolécules Max Mousseron (CNRS/Université de Montpellier/ENSCM), le Centre de recherche Paul Pascal (CNRS/Université de Bordeaux) et le laboratoire Physiologie et médecine expérimentale du cœur et des muscles (CNRS/Inserm/Université de Montpellier.
Gaëtan Bellot
Chercheur Inserm
Centre de biologie structurale (Inserm/CNRS/Université de Montpellier)
E-mail : rf.mresni@tolleb.nateag
Téléphone sur demande
A Modular Spring-Loaded Actuator for Mechanical Activation of Membrane Proteins
Nature Communications, juin 2022
DOI : 10.1038/s41467-022-30745-2
Mills, A.1, Aissaoui, N.1, Maurel, D.2, Elezgaray, J.4 , Morvan, F.3, Vasseur, JJ.3, Margeat, E.1 , Quast, RB.1, Lai Kee-Him, J.1, Saint, N.5, Benistant, C.1, Nord, A.1, Pedaci, F.1, Bellot, G.1*
1 Université de Montpellier, Centre de Biologie Structurale, INSERM, CNRS, 34090
Montpellier, France.
2 Université de Montpellier, Institut de Génomique Fonctionnelle, INSERM, CNRS, 34090
Montpellier, France.
3 IBMM, Université de Montpellier, CNRS, ENSCM, Montpellier, France.
4 CRPP, CNRS, UMR 5031, Université de Bordeaux, Pessac, France
5 PHYMEDEXP, Université de Montpellier, CNRS, INSERM, 34090 Montpellier, France
A Modular Spring-Loaded Actuator for Mechanical Activation of Membrane Proteins
Mills, A.1, Aissaoui, N.1, Maurel, D.2, Elezgaray, J.4 , Morvan, F.3, Vasseur, JJ.3, Margeat, E.1 , Quast, RB.1, Lai Kee-Him, J.1, Saint, N.5, Benistant, C.1, Nord, A.1, Pedaci, F.1, Bellot, G.1*
1 Université de Montpellier, Centre de Biologie Structurale, INSERM, CNRS, 34090
Montpellier, France.
2 Université de Montpellier, Institut de Génomique Fonctionnelle, INSERM, CNRS, 34090
Montpellier, France.
3 IBMM, Université de Montpellier, CNRS, ENSCM, Montpellier, France.
4 CRPP, CNRS, UMR 5031, Université de Bordeaux, Pessac, France
5 PHYMEDEXP, Université de Montpellier, CNRS, INSERM, 34090 Montpellier, France
Nature Communications, juin 2022
DOI : 10.1038/s41467-022-30745-2